机器人回放案例展示¶
真实机器人案例展示是 WorldForge 的主要端到端物理 AI 演示。它将 Hugging Face LeRobot 策略与 LeWorldModel 代价模型检查点相结合,然后使用 WorldForge 的策略加打分规划器来选取并 mock 回放最优动作片段。
该命令不控制任何硬件。它演示策略推断、打分模型推断、候选动作排序、提供方事件以及本地回放;机器人控制器、安全检查以及任务专属预处理仍由宿主方持有。
默认任务为 PushT,默认策略为 lerobot/diffusion_pusht,默认 LeWorldModel 检查点为 ~/.stable-wm/pusht/lewm_object.ckpt。
有关实现层面的契约、张量形状、提供方调用序列以及真实机器人映射,请参阅机器人案例展示技术深入解析。
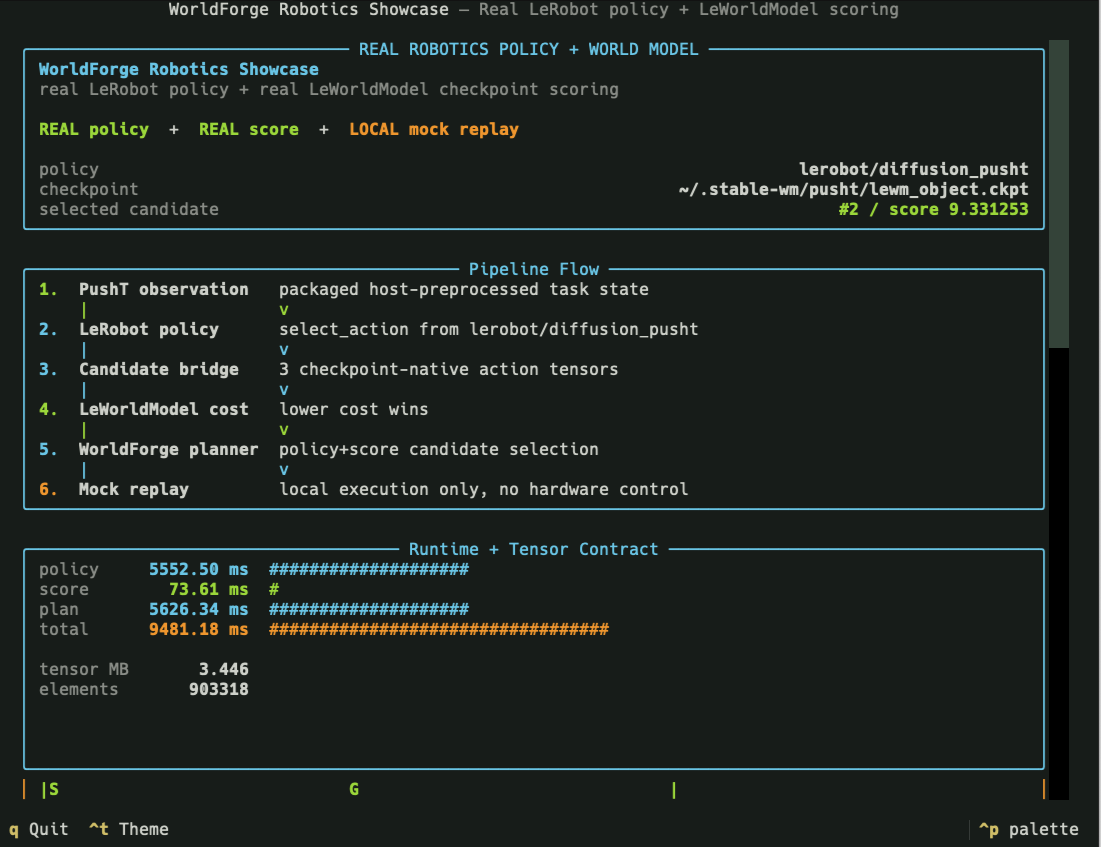
流水线:真实 LeRobot 策略、真实 LeWorldModel 检查点打分、WorldForge 规划、本地 mock 回放。 |
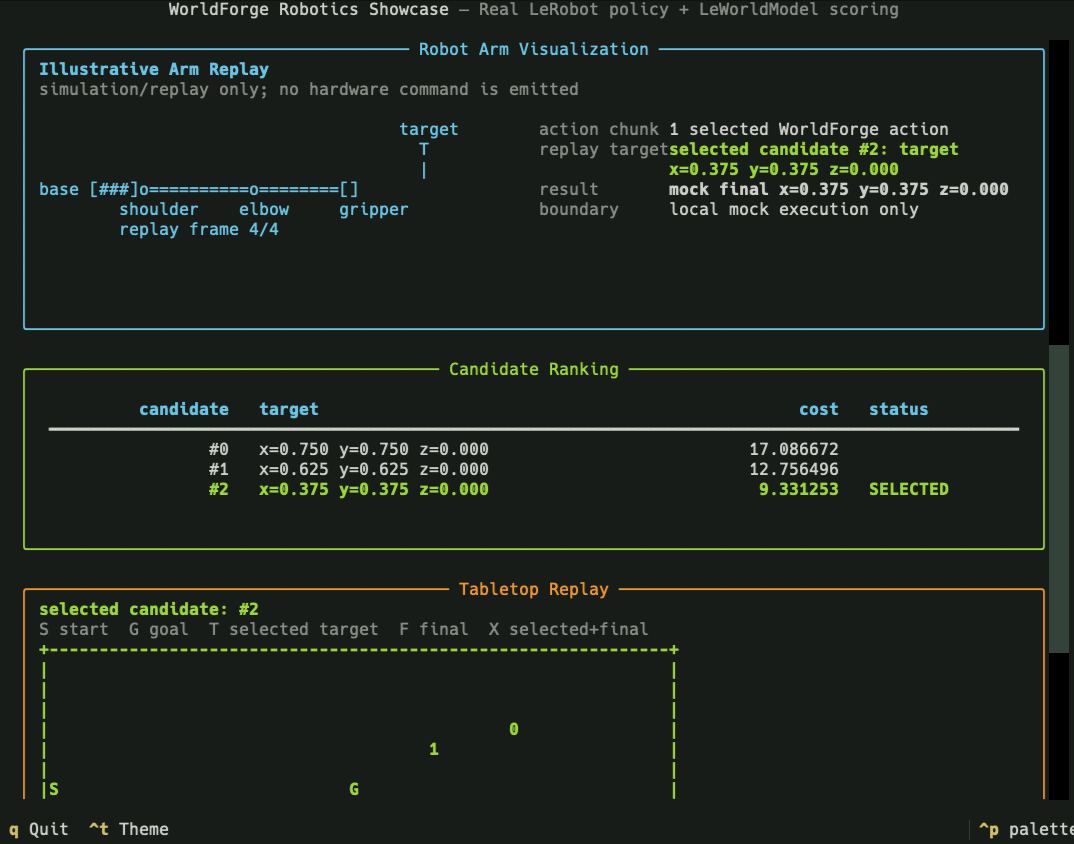
决策:所选候选、代价分布、提供方事件以及桌面回放。 |
运行方式¶
使用单命令案例展示入口点:
默认情况下,该脚本:
- 启动带有宿主方持有可选依赖的临时 Python 3.13
uv运行时; - 请求
lerobot[transformers-dep]==0.5.1,使 Python 3.13 策略导入路径在 LeWorldModel 运行时也已安装的情况下保持稳定; - 运行真实的 LeRobot 策略推断和真实的 LeWorldModel 检查点打分;
- 打开分阶段的 Textual 报告,包含流水线跟踪、指标条、张量契约、候选排序、提供方事件日志、机械臂图示、桌面回放以及 Rerun 打开快捷方式;
- 将 JSON 摘要写入
/tmp/worldforge-robotics-showcase/real-run.json; - 将可视化 Rerun 记录写入
/tmp/worldforge-robotics-showcase/real-run.rrd; - 在
.worldforge/tensorboard/下写入 TensorBoardtfevents日志,用于 LeWorldModel 检查点检视(来源、得分分布、延迟、提供方事件)。
常用标志:
scripts/robotics-showcase --health-only # 无副作用的依赖/检查点预检
scripts/robotics-showcase --no-tui # 纯终端报告
scripts/robotics-showcase --json-only # 仅机器可读摘要
scripts/robotics-showcase --no-rerun # 跳过默认的 Rerun .rrd 工件
scripts/robotics-showcase --rerun-output /tmp/pusht.rrd
scripts/robotics-showcase --no-tensorboard # 跳过默认的 TensorBoard tfevents
scripts/robotics-showcase --tensorboard-logdir .worldforge/tensorboard/pusht
scripts/robotics-showcase --tui-stage-delay 0.1
scripts/robotics-showcase --no-tui-animation
scripts/robotics-showcase --lewm-asset-cache-dir ~/.cache/worldforge/leworldmodel
scripts/robotics-showcase --lewm-revision 22b330c28c27ead4bfd1888615af1340e3fe9052
在 TUI 中按 o 打开 Rerun 工件,或从 Shell 运行:
在 TUI 中按 t 打开 TensorBoard 日志,或从 Shell 运行:
有关标签布局和编程式 API,请参阅 TensorBoard 集成。
CI 冒烟测试策略¶
实时可选运行时工作流为 .github/workflows/robotics-showcase.yml。它与普通的可安全检出 CI 门控分开,因为它下载模型资产并在 CPU 上运行真实的 LeRobot 和 LeWorldModel 推断。它在每次拉取请求更新和推送到 main 时运行,无需手动触发、定时调度、标签门控或路径过滤器。
CI 命令刻意设计为非交互式:
scripts/robotics-showcase \
--json-only \
--no-tui \
--no-rerun \
--stablewm-home "$STABLEWM_HOME" \
--lewm-cache-dir "$STABLEWM_HOME" \
--lewm-asset-cache-dir "$LEWORLDMODEL_ASSET_CACHE_DIR" \
--lewm-revision "$LEWORLDMODEL_REVISION" \
--lerobot-cache-dir "$LEROBOT_CACHE_DIR" \
--json-output "$WORLDFORGE_ROBOTICS_RUN_DIR/real-run.json" \
--run-manifest "$WORLDFORGE_ROBOTICS_RUN_DIR/run_manifest.json"
工作流对 Hugging Face 策略下载、LeWorldModel 配置/权重下载、构建的 LeWorldModel 对象检查点以及 uv 包缓存使用 actions/cache。缓存键包含 Python 3.13、固定的 LeRobot 运行时版本和固定的 Hugging Face LeWM 修订版本。工作流默认仅上传经净化的 JSON 证据:real-run.json、stdout.json 和 run_manifest.json。LeWorldModel 检查点工件不上传,因为 GitHub Actions 工件是按运行的证据,并非最佳的长期检查点缓存。
演示内容¶
案例展示演练了 WorldForge 所设计的组合方式:
PushT observation
-> LeRobot policy checkpoint
-> policy action candidates
-> WorldForge candidate bridge
-> LeWorldModel candidate tensors
-> LeWorldModel cost-model scoring
-> WorldForge policy+score planner
-> local mock replay
-> visual report and JSON artifact
核心规划器调用为:
world.plan(
policy_provider="lerobot",
score_provider="leworldmodel",
planning_mode="policy+score",
...
)
LeRobot 被视为 policy 提供方,LeWorldModel 被视为 score 提供方。规划器使用策略输出作为候选动作片段,让打分提供方对这些候选排序,选取代价最低的片段,并将所选可执行动作应用于本地 mock 世界。
解读报告面板¶
Textual 报告应被视为一条简短的证据链,而非通用仪表盘:
| 面板 | 解读方式 | 含义 |
|---|---|---|
| 运行时条形图 | policy、score、plan 和 total 为已完成运行的挂钟毫秒数。 |
policy 是 LeRobot 检查点调用,score 是 LeWorldModel 代价调用,plan 是 WorldForge 编排,total 包含整个案例展示流程。 |
| 张量契约 | tensor MB 和 elements 描述了传递给 LeWorldModel 的预处理打分张量。 |
这些数字解释了运行时形状和大小,不代表任务成功、物理保真度或模型质量得分。 |
| 候选排序 | 代价越低越好。SELECTED 行是 WorldForge mock 回放的候选。 |
所选行应与 best_index、提供方事件日志以及桌面回放的所选/最终标记一致。 |
综合解读各面板。一次连贯的运行应具有健康的提供方事件、与得分数量匹配的候选数量、一个所选候选,以及所选标记与所选行一致的桌面回放。如果存在不一致,在信任可视化结果之前应检查动作转换器、候选桥接、打分张量或任务预处理。
解读桌面回放¶
桌面回放是 PushT 工作空间的小型俯视图。像从天花板往下看一样阅读它:左/右是归一化的 x 轴,垂直位置是任务的桌面平面。它不是完整的物理仿真轨迹,也不是硬件摄像头画面。它是一张紧凑的地图,展示起始位置、目标、候选目标点、所选目标以及最终 mock 回放状态。
示例输出:
Tabletop replay
---------------
legend: S=start, G=goal, T=selected target, F=mock final, X=selected+final
selected candidate: #2
+------------------------------------------+
| |
| |
| |
| 0 |
| 1 |
| |
|S G |
| |
| X |
| |
| |
| |
| |
+------------------------------------------+
x=0.00 x=0.50 x=1.00
通俗解读:
S是方块在本地回放中的起始位置。G是期望的目标区域。0和1是由 LeRobot 策略提出并由 LeWorldModel 打分的备选动作候选。selected candidate: #2表示规划器选择了候选#2作为代价最低的候选。X表示所选目标和 mock 最终状态落在同一渲染单元格上。在此示例中,候选#2没有单独打印为2,因为地图将"所选目标"和"最终回放位置"合并为X。x=0.00、x=0.50和x=1.00标记归一化桌面的左、中、右侧。
心智模型很简单:想象策略说"这里有几个我可以尝试推动物体的位置",这些可能的目标以候选标记出现。然后世界模型说"这个在目标下代价最低或最有希望",WorldForge 选择该候选,将其转换为可执行的本地动作,并运行 mock 回放。地图展示决策结果:哪个候选胜出以及本地回放结束在哪里。
回放很有价值,因为它使策略加打分循环一目了然。如果所选候选接近目标且最终标记与其重叠,则本地规划对于这个玩具回放是连贯的。如果所选标记距目标很远,或最终标记与所选目标偏离,这是检查候选桥接、打分张量、动作转换器或任务预处理的信号。
逐步说明¶
-
解析运行时设置。 脚本选择 LeRobot 策略路径、LeWorldModel 策略名称、检查点路径、设备、缓存目录以及 PushT 桥接默认值。
-
预检可选依赖。 LeRobot、
stable_worldmodel、torch、datasets、PushT 仿真包以及 Textual 从宿主方持有的uv运行时加载,它们不是 WorldForge 基础依赖。 -
构建任务观测和打分张量。
worldforge.smoke.pusht_showcase_inputs提供封装好的 PushT 观测、LeWorldModel 打分信息张量、动作转换器以及默认演示所使用的候选构建钩子。 -
运行 LeRobot 策略。
LeRobotPolicyProvider加载PreTrainedPolicy,调用配置的策略模式,并保留原始策略输出与提供方事件元数据。 -
将策略动作桥接为候选张量。 封装好的 PushT 桥接将策略候选转换为 LeWorldModel 形状的动作候选张量。WorldForge 验证提供方边界,但不推断任务专属图像变换,也不投影不匹配的动作空间。
-
使用 LeWorldModel 对候选打分。
LeWorldModelProvider调用stable_worldmodel.policy.AutoCostModel,并通过 WorldForge 的score能力返回经排序的候选代价。 -
选取并回放规划。 WorldForge 从策略加打分规划中选取最优候选,并将转换后的动作片段应用于本地 mock 世界。此回放是本地可视化和状态更新,而非硬件执行。
-
渲染报告。 案例展示在 Textual 报告中展示流水线、运行时指标、张量大小、候选代价分布、所选规划、提供方事件以及桌面回放。相同数据以 JSON 格式保存,用于自动化和回归检查。
什么是真实的,什么是本地的¶
| 界面 | 运行时 | 边界 |
|---|---|---|
| LeRobot 策略 | 真实的宿主方持有 LeRobot 检查点 | 产生任务专属的原始策略动作。 |
| LeWorldModel 打分 | 真实的宿主方持有 LeWorldModel 对象检查点 | 对预处理的像素、目标、历史和候选张量打分。 |
| PushT 桥接 | 封装好的 WorldForge 演示钩子 | 提供默认观测、打分信息张量、转换器和候选构建器。 |
| WorldForge 规划器 | 仓库内类型化编排 | 组合 policy 和 score 提供方,验证数量,选取最优动作片段。 |
| 执行 | 本地 mock 世界回放 | 仅为可视化更新本地场景。 |
| 机器人硬件 | 宿主方持有 | 控制器、安全检查、标定以及物理执行不在本演示范围内。 |
此区分是刻意为之。案例展示证明了真实的策略推断、真实的打分模型推断以及 WorldForge 的规划组合,但不声称物理安全性、硬件就绪性或任务通用预处理能力。
工件与指标¶
JSON 摘要包含:
- 所选候选索引和候选得分;
- LeRobot 策略延迟、LeWorldModel 打分延迟、规划延迟和总延迟;
- 张量形状和近似张量内存;
- 提供方事件日志条目;
- 所选动作数量和最终 mock 世界状态。
默认工件路径:
需要保存特定工件位置时,在底层运行器上使用 --json-output <path>。使用 --run-manifest <path> 将证据清单与摘要并排放置在另一个目录中。清单将策略、打分、回放和报告证据链接回保留的摘要 JSON 和状态目录,而不嵌入检查点字节、原始策略输入或凭据。
自定义案例展示¶
封装好的 scripts/robotics-showcase 命令是经过完善的 PushT 入口点。对于其他任务,使用底层可配置运行器:
scripts/lewm-lerobot-real \
--policy-path lerobot/diffusion_pusht \
--policy-type diffusion \
--checkpoint ~/.stable-wm/pusht/lewm_object.ckpt \
--device cpu \
--mode select_action \
--observation-module /path/to/task_inputs.py:build_observation \
--score-info-npz /path/to/lewm_score_tensors.npz \
--translator /path/to/task_bridge.py:translate_candidates \
--candidate-builder /path/to/task_bridge.py:build_action_candidates
对于非 PushT 任务,宿主必须提供:
- 与任务对齐的 LeRobot 策略和观测构建器;
- 兼容 LeWorldModel 的
pixels、goal、action_history和action_candidates张量; - 将原始策略动作转换为可执行 WorldForge
Action对象的动作转换器; - 保留模型期望的动作维度和视野长度的候选构建器。
在转到已准备好宿主检查点之前,请使用可安全检出的候选实验室:
uv run python scripts/demo_showcases.py run policy-score-candidate-lab --workspace-dir .worldforge/demo-showcases --overwrite
它证明了 WorldForge 策略加打分工件路径、原始动作保留、所选候选、无效候选边界以及缺少转换器时的失败行为,无需机器人硬件、仿真器或检查点下载。
当默认 LeWorldModel 对象检查点缺失时,经过完善的命令可以从 Hugging Face 资产构建它。默认使用固定的 Hugging Face 提交 22b330c28c27ead4bfd1888615af1340e3fe9052;使用 --lewm-revision <40字符提交SHA> 或 LEWORLDMODEL_REVISION 指定不同的经审计的不可变资产修订版本。构建器在实例化模型或下载权重之前,对照官方 PushT LeWM 目标和参数白名单验证下载的 Hydra 配置。然后默认使用 torch.load(..., weights_only=True) 加载 weights.pt;--allow-unsafe-pickle 标志是针对历史权重的显式可信工件转义通道。此自动构建路径对 --health-only 跳过,后者仅报告检查点是否存在。
WorldForge 在遇到不匹配的动作空间时会报错,而不是填充、投影或静默重新解释。
源文件映射¶
src/worldforge/smoke/robotics_showcase.py实现经过完善的报告入口点。src/worldforge/smoke/lerobot_leworldmodel.py实现底层真实策略加打分运行器。src/worldforge/smoke/pusht_showcase_inputs.py包含封装好的 PushT 观测、打分信息、转换器和候选桥接。src/worldforge/providers/lerobot.py实现 LeRobot 策略提供方。src/worldforge/providers/leworldmodel.py实现 LeWorldModel 打分提供方。src/worldforge/_world.py包含策略加打分规划路径。
相关文档:
外部参考: